PIC16F18346の基本動作から応用プログラムまでを学びます。

PIC16F18346には、シリアル通信を行うためのEUSART(Enhanced Universal Synchronous Asynchronous Receiver Transmitter )が組み込まれています。EUSARTには、同期および非同期のシリアル送受信を行う機能がありますが、ここでは、非同期の送受信にかかわるプログラムの説明です。
*注意*
TX/CKをどのピンにするかは、PPS機能の希望するピンのRxyPPSレジスターに、”TX/CK"を表す"20(0x14)"を書き込み指示します。また、指示したピンの TRISは「1」入力、ANSELは「0」デジタルにする必要があります。
*注意*
RX/DTピンは、PPS機能を利用し他に変更することが可能です。また、RXピンの、TRISは「1」、ANSELは「0」にする必要があります。
非同期8ビットシリアル、パリティーなし、9600bpsで受信するプログラムを作成しました。 リセット直後にSWを押すと開始メッセージ。その後 SWを押すたびに、「SW OK」と送信します。また、データを受信すると、値を +1 して送り返します。
*参考*
内蔵クロック 32MHz、シリアル速度 115200bpsに変更するには、以下の3行を変更します。
| #define _XTAL_FREQ 1000000 | --> #define _XTAL_FREQ 32000000 |
| RSTOSC = HFINT1 | --> RSTOSC = HFINT32 |
| SP1BRG = 25; | --> SP1BRG = 68; |
<回路図>
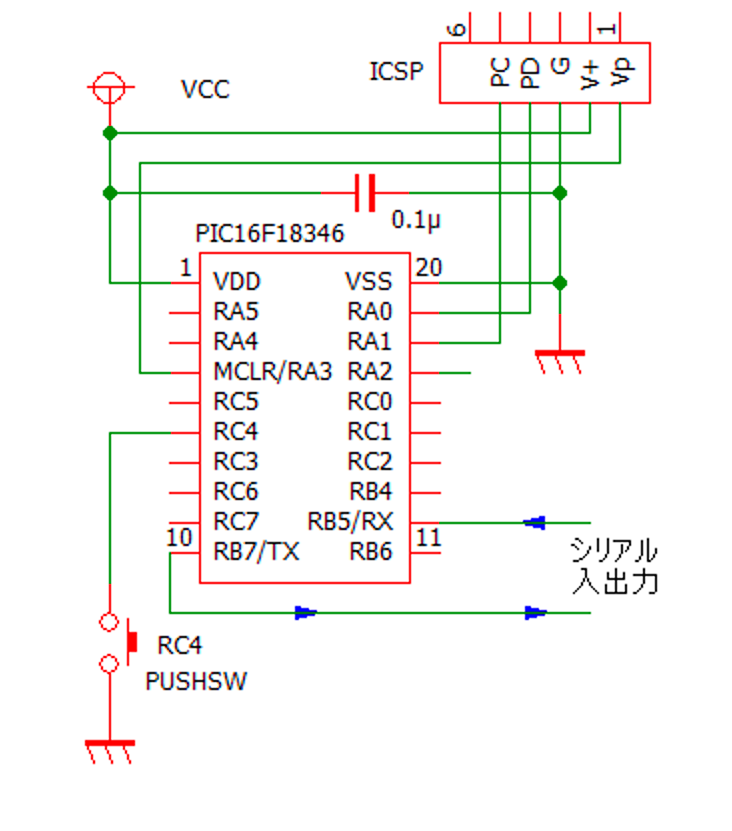
Criosity開発ボードにシリアルUSB変換モジュールを取り付けて使用しています。
<プログラム>
/*************************************
* File: UART TXRX sample
* System ClockはConfigで内部1MHzに設定
* UARTでデータを送受信する。
* SWを押すと開始メッセージ。その後 SWを押すたびに、「SW OK」
* データを受信すると、値を +1 して送り返す
* PIC16F18325 --> PIC16F18346
* Created on Aug 22, 2017, 2:37 PM
**************************************/
#include <xc.h>
#include <stdio.h>
#define _XTAL_FREQ 1000000 // delay_ms(x) のための定義
#pragma config FEXTOSC = OFF,RSTOSC = HFINT1 // HFINTOSC (1MHz)
#pragma config CLKOUTEN = OFF,CSWEN = OFF,FCMEN = OFF
#pragma config MCLRE = ON,PWRTE = OFF,WDTE = OFF,LPBOREN = OFF
#pragma config BOREN = OFF,BORV = LOW,PPS1WAY = OFF,STVREN = ON
#pragma config DEBUG = OFF
#pragma config WRT = OFF,LVP = ON,CP = OFF,CPD = OFF
#define pushSW PORTCbits.RC4
// ================= printf関数を使用するための定義 =================
void putch(unsigned char ch) {
while (!TXIF); //送信終了待ち
TX1REG = ch;
}
// ******************* main *************************************
void main() {
char RxData;
char SWstate = 0; // SWの状態
TRISA = 0b111111; // Port すべて入力
TRISB = 0b11111111; // Port すべて入力
TRISC = 0b11111111; // Port すべて入力
ANSELA = 0; // すべてデジタル
ANSELB = 0; // すべてデジタル
ANSELC = 0; // すべてデジタル
WPUA = 0b001000; // RA3 弱プルアップ ON
WPUC = 0b00010000; // RC4 弱プルアップ ON
// RC4PPS = 20; // RC4をTX出力とする
// RXPPS = 0x15; // RC5をRX入力とする
RXPPS = 0x0D; //RB5->EUSART:RX;
RB7PPS = 0x14; //RB7->EUSART:TX;
//------------ Initialize UART ----------------------------------
RC1STA = 0b10010000; // 8 bit 連続受信
TX1STA = 0b00100100; // 非同期送受信 High Baud Rate選択
BAUD1CON = 0b00001000;
SP1BRGH = 0;
SP1BRG = 25;
while(pushSW); // SWが押されるのを待つ
printf("Hello OK\r\n"); // 開始のメッセージ
// ----------- 繰返し --------------------------------------------
while(1){
// ------ 受信 ------------------------------------------------
if(RCIF){
RxData = RC1REG; // 受信データを取り込む
switch(RxData){ // データ内容で、On/Off
case 0x0A:
case 0x0D:
while (!TXIF); //送信終了待ち
TX1REG = RxData;
break;
default:
while (!TXIF); //送信終了待ち
TX1REG = RxData + 1;
break;
}
}
// ------ 送信 ------------------------------------------------
if(pushSW != SWstate){ // SWの状態が変化したら
__delay_ms(10); // 10mS遅延
SWstate = pushSW; // 新しい状態を記録
if(pushSW == 0){ // SWが押されたのなら
printf("SW ON\r\n"); // 開始のメッセージ
}
}
}
}
同じ動作のアセンブラプログラムは、[こちら]