PIC16F1619の基本動作から応用プログラムまでを学びます。

PIC16F1619には、Master Synchronous Serial Port (MSSP) があり、MSSP を使うと周辺機器と簡単にシリアル通信を行うことができます。MSSPは、SPIとI2Cという2種類の方式をサポートしていまが、ここでは、I2Cを利用したLCD表示器とのインターフェースだけを取り上げます。このため、I2C マスターモードが対象です。
<回路図>
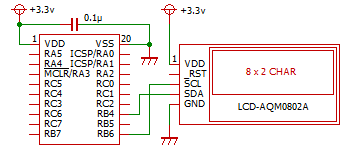
PI2Cを利用したLCD表示器(LCD-AQM0802A)「LCD Test / I2C com」と表示するプログラムを作成しました。通常 I2Cラインに取り付けるプルアップ抵抗は、PIC内の弱プルアップを利用しています。雑音の大きい環境で使用するときは、別途プルアップ抵抗を回路に取り付けてください。
<プログラム>
/*********************************************************************
* データをLCDに表示する。
* 秋月(ACM1602NI)I2C LCD表示器を使用
* 1MHz (内部クロック)
* RB6 SCL
* RB4 SDA
*
* PIC16F1619 MPLAB X IDE with XC8
* Copyright (c) 2017 iwamoto All Rights Reserved
* *******************************************************************/
#include <xc.h>
#define _XTAL_FREQ 1000000
//*********************************************************************
// 調整用定数
//*********************************************************************
#define CONTRAST 0x28 // for 3.3V
// #define CONTRAST 0x18 // for 5.0V
#define slaveDeviceAddress 0x7C
// CONFIG1
#pragma config FOSC = INTOSC
#pragma config PWRTE = OFF
#pragma config MCLRE = ON
#pragma config CP = OFF
#pragma config BOREN = ON
#pragma config CLKOUTEN = OFF
#pragma config IESO = ON
#pragma config FCMEN = ON
// CONFIG2
#pragma config WRT = OFF
#pragma config PPS1WAY = ON
#pragma config ZCD = OFF
#pragma config PLLEN = OFF
#pragma config STVREN = ON
#pragma config BORV = LO
#pragma config LPBOR = OFF
#pragma config LVP = ON
// CONFIG3
#pragma config WDTCPS = WDTCPS1F
#pragma config WDTE = OFF
#pragma config WDTCWS = WDTCWSSW
#pragma config WDTCCS = SWC
//******************* プロトタイプ *******************************
void i2cByteWrite(char, char, char);
void i2cTxData(char);
void LCD_dat(char);
void LCD_cmd(char);
void LCD_clr(void);
void LCD_posyx(char,char);
void LCD_int(void);
void LCD_put(char);
void LCD_str(char *);
void LCD_ROMstr(const char *);
/*********************************************************
Main application
*********************************************************/
void main(void)
{
OSCCON = 0x58; // FOSC; PLL disabled; 1MHz_HF;
LATA = 0x00; // 全てクリア
LATB = 0x00;
LATC = 0x00;
TRISA = 0xFF; // 全て入力
TRISB = 0xFF;
TRISC = 0xFF;
ANSELC = 0x00; // 全てデジタル
ANSELB = 0x00;
ANSELA = 0x00;
WPUB = 0xFF; // 全て弱プルアップ
WPUA = 0xFF;
WPUC = 0xFF;
OPTION_REGbits.nWPUEN = 0;
ODCONB = 0b01010000; // RB6,RB4をオープンドレイン
SSPCLKPPS = 0b00001110; // RB6をCLK入力に指定
RB6PPS = 0b00010000; // RB6をCLK出力に指定
SSPDATPPS = 0b00001100; // RB4をDATに入力指定
RB4PPS = 0b00010001; // RB4をDAT出力に指定
// SSP1設定 -----------------------------------------------
SSP1STAT = 0b10000000; // スルーレート制御はOff
SSP1ADD = 3; // クロック設定 65k@1MHz
SSP1CON1 = 0b00101000; // I2C Master modeにする
// --------------------------------------------------------
char msgStart[] ="LCD Test";
LCD_int(); // LCDを初期化
LCD_str(msgStart); // LCD上段に"LCD Disp Test"
LCD_posyx(1,1); // 下段にカーソル移動
LCD_ROMstr("I2C com"); // 下段に追記
while (1)
{
// Add your application code
}
}
//********************************************************************
// I2C 関連
//********************************************************************
//-------- ByteI2C送信
void i2cByteWrite(char addr, char cont, char data){
SSP1CON2bits.SEN = 1; // Start condition 開始
while(SSP1CON2bits.SEN); // Start condition 確認
i2cTxData(addr); // アドレス送信
i2cTxData(cont); // 制御コード送信
i2cTxData(data); // データ送信
SSP1CON2bits.PEN = 1; // Stop condition 開始
while(SSP1CON2bits.PEN); // Stop condition 確認
}
//-------- Data送信
void i2cTxData(char data){
PIR1bits.SSP1IF = 0; // 終了フラグクリア
SSP1BUF = data; // データセット
while(!PIR1bits.SSP1IF); // 送信終了待ち
}
//********************************************************************
// LCD 関連
//********************************************************************
//-------- 1文字表示
void LCD_dat(char chr){
i2cByteWrite(0x7C, 0x40, chr);
__delay_us(50); // 50μsec
}
//-------- コマンド出力
void LCD_cmd(char cmd){
i2cByteWrite(0x7C, 0x00, cmd);
if(cmd & 0xFC) // 上位6ビットに1がある命令
__delay_us(50); // 50usec
else
__delay_ms(2); // 2msec ClearおよびHomeコマンド
}
//-------- 全消去
void LCD_clr(void){
LCD_cmd(0x01); //Clearコマンド出力
}
//-------- カーソル位置指定
void LCD_posyx(char ypos, char xpos){
unsigned char pcode;
switch(ypos & 0x03){
case 0: pcode=0x80;break;
case 1: pcode=0xC0;break;
}
LCD_cmd(pcode += xpos);
}
//-------- 初期化
void LCD_int(void){
__delay_ms(100);
LCD_cmd(0x38); // 8bit 2行 表示命令モード
LCD_cmd(0x39); // 8bit 2行 拡張命令モード
LCD_cmd(0x14); // OSC BIAS 設定1/5
// コントラスト設定
LCD_cmd(0x70 + (CONTRAST & 0x0F));
LCD_cmd(0x5C + (CONTRAST >> 4));
LCD_cmd(0x6B); // Ffollwer
__delay_ms(100);
__delay_ms(100);
LCD_cmd(0x38); // 表示命令モード
LCD_cmd(0x0C); // Display On
LCD_cmd(0x01); // Clear Display
}
//-------- 文字列出力
void LCD_str(char *str){
while(*str) //文字列の終わり(00)まで継続
LCD_dat(*str++); //文字出力しポインタ+1
}
//-------- Rom 文字列出力
void LCD_ROMstr(const char *str){
while(*str) //文字列の終わり(00)まで継続
LCD_dat(*str++); //文字出力しポインタ+1
}