---
---


赤外線リモコンの信号を受信しボードのLEDを点灯させるプログラムです。
リモコンの「1」ボタンを押すと「LED D1」 が点灯します。
再び「1」を押すとLEDは消灯します。
同様に、リモコンの「2」「3」「4」がそれぞれ LED「D2」「D3」「D4」に対応します。
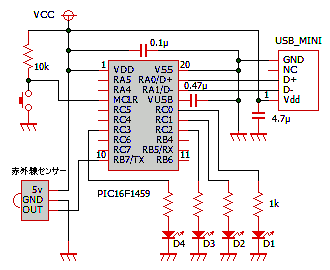
PICのペリフェラルは以下の用途に使用しています。
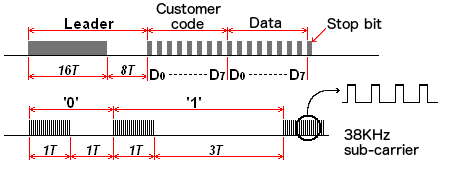
この受信機は、JVCTVリモコンの使用を想定したプログラムになっています。JVCは、NECが設定した赤外線リモコン仕様に準拠しており、以下のフォーマット仕様です。
| キャリア | 赤外線(λp = 940nm) | Data部 詳細 (T = 562μs) | |
| サブキャリア | fsc = 38kHz, 1/3duty | Data の '1' | Mark 1T + Space 3T |
| Leader 部 | Mark 9mSec Space 4.5mSec | Data の '0' | Mark 1T + Space 1T |
| Data 部 | 固定長フレーム (16bit) 8bitのカスタマーコード + 8bitのコマンドデータ |
Stop bit | Mark 1T |
プロジェクト B08_irRxSimple.zip |
*注意*
MPLAB X プロジェクト には、PICkit3で書き込む仕様とブートローダで書き込む2通りの仕が設定されています。どちらを利用するかをメインメニューバーのIDE Configuration pull down で選んでください。
// ----------------------------------------------------------------
// NECタイプの赤外線リモコン受信 2017/1/14 OK
// Notes: 250kHz 内部クロック
// LED1 RC0, LED2 RC1, LED3 RC2, LED4 RC3
// Sencer RB7
// Language: MPLABX XC8
// Target: PIC16F1459
// Rev2 Freq 250k 16bit data
// ----------------------------------------------------------------
#define _XTAL_FREQ 4000000/16 // delay_ms(x) のための定義 ==250k==
#define L_ON_Min 5000/16 // 5msec リーダーの最小継続時間
#define DataTH 1000/16 // 1msec データの「1」「0」境界時間
#define D_Off_Max 2000/16 // 2msec データ「0」の最大継続時間
#define IrIN RB7 // 赤外線センサー入力
#define LED1 LATC0
#define LED2 LATC1
#define LED3 LATC2
#define LED4 LATC3
#include <xc.h>
#pragma config FOSC = INTOSC, WDTE = OFF, PWRTE = OFF, MCLRE = OFF
#pragma config CP = OFF, BOREN = ON, CLKOUTEN = OFF, IESO = OFF
#pragma config FCMEN = OFF, WRT = OFF, CPUDIV = NOCLKDIV
#pragma config USBLSCLK = 48MHz, PLLMULT = 3x, PLLEN = ENABLED
#pragma config STVREN = ON, BORV = LO, LPBOR = OFF, LVP = OFF
unsigned int IrCmdRcv(void);
// MAIN ********************************************************
void main(void){
unsigned int revdData;
OSCCON = 0b00011010; // 内部クロック250khz
LATC = 0; // LED 初期化
TRISC&=0xF0;
// Pin 状態変化 初期化
IOCBNbits.IOCBN7 = 1; // 負極性の変異でWake-up
INTCONbits.IOCIE = 1; // Wake-up 許可
// Timer 1 設定 -------------------------------------------
// リモコンパルス幅の計測に使用する Timer は、1カウント 16uS
T1CON = 0b00000000; // Timer 1 FOSC/4 1/1(66mSecx16ごと)
T1GCON = 0b00000000; // Timer 1 Gate設定(使用せず)
while(1){ // 繰り返しループ
TMR1ON = 0; // Timer1 OFF
IOCBFbits.IOCBF7 = 0; // 入力変位フラッグ クリア
SLEEP(); // 無信号時はスリープ
//--------------------
TMR1ON = 1; // Timer1 ON
revdData = IrCmdRcv(); // データー取得
if(revdData == 0) continue; // データー無
// ---- 受信データーの処理 -----------------------------------
switch (revdData){
case 0xC084: LED1 = !LED1; break; // Key 1 LED1 反転
case 0xC044: LED2 = !LED2; break; // Key 2 LED2 反転
case 0xC0C4: LED3 = !LED3; break; // Key 3 LED3 反転
case 0xC024: LED4 = !LED4; break; // Key 4 LED4 反転
default: LATC = 0; break; // 他のKey 全消灯
}
}
}
//*************** 赤外線データーを受信する *****************************
// 正常にデーターを受信したときは、そのデーターを返り値とし
// 無信号、エラー時は、0を返す。
// ビクターの信号体系(NEC系)を受信
// リーダ受信確認、データ受信(16bits)する
//*******************************************************************
unsigned int IrCmdRcv(void){
unsigned int rcvData = 0;
if(IrIN) return 0; // 無信号「1」時は復帰
// ------- Start Bit (リーダー)の確認 -----------------------------
//OnおよびOFFの時間を確認しノイズか有効データか判断する
// ---------------------------------------------------------------
TMR1 = 0; // -- リーダーのON 時間測定
while(TMR1 < L_ON_Min){ // リーダーの最小継続に達しないのに
if(IrIN)return 0; // IR Space「1」無信号になったら
} // ノイズと判断し復帰
while(!IrIN); // IR Space 待ち
TMR1 = 0; // -- リーダーのOFF時間測定
while(IrIN){ // リーダーの終了時間を越えても待ち
if(TMR1 > L_ON_Min)return 0; // data開始(IrON)しなければ復帰
}
// ------- dataの確認 -----------------------------------
for(char i = 0; i < 16; i++){ // 1ビットずつ16回繰り返す
rcvData <<= 1;
while(!IrIN); // space 開始を待つ
TMR1 = 0; // Bitのspace時間測定開始
while(IrIN) // space 終了を待つ
if(TMR1 > D_Off_Max) // 2mS以上ならStopなので
return 0; // 復帰
if(TMR1 > DataTH) // 時間取得「1」「0」判定
rcvData |= 1; // 「1」を立てる
}
return rcvData; // 受信データを持って復帰
}