---
---

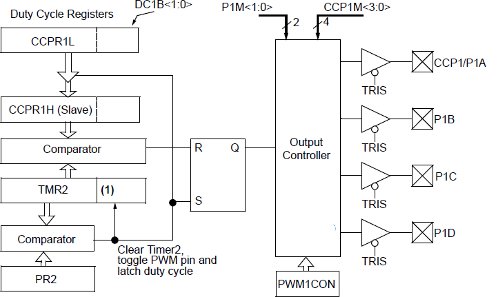
ECCP (Enhanced Capture/Compare/PWM)のPWM(Pulse Width Modulation) モードは、分解能10ビットのPWM 信号をタイマー2と連携して発生させることができます。PWM 出力モードには、以下の4 種類がありますが、ここでは、 シングルPWMの説明です。
シングル出力モードを選択 (CCP1CON レジスタの CCP1M<3:2> = 11 および P1M<1:0> = 00) した上で、 PSTRCON レジスタの該当する STR<D:A> ビットを設 定する事で、同じ PWM 信号 を1~4本の出力ピンに出力できます。
| レジスタ | bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 |
|---|---|---|---|---|---|---|---|---|
| RCON | IPEN | SBOREN | — | RI | TO | PD | POR | BOR |
| INTCON | GIE/GIEH | PEIE/GIEL | TMR0IE | INTIE | RABIE | TMR0IF | INT0IF | RABIF |
| PIR1 | - | ADIF | RCIF | TXIF | SSP1IF | CCP1IF | TMR2IF | TMR1IF |
| PIE1 | - | ADIE | RCIE | TXIE | SSP1IE | CCP1IE | TMR2IE | TMR1IE |
| IPR1 | — | ADIP | RCIP | TXIP | SSPIP | CCP1IP | TMR2IP | TMR1IP |
| CCP1CON | P1M < 1 - 0 > | DC1B < 1 - 0 > | CCP1M < 3 - 0 > | |||||
| PSTRCON | STRSYNC | STRD | STRC | STRB | STRA | |||
| TRISC | TRISC7 | TRISC6 | TRISC5 | TRISC4 | TRISC3 | TRISC2 | TRISC1 | TRISC |
| CCPR1L | CCP Register 1, Low Byte | |||||||
| CCPR1H | CCP Register 1, High Byte | |||||||
| レジスタ | BIT | 名 | 説明 | 1 | 0 |
|---|---|---|---|---|---|
| RCON | 7 | IPEN | 2レベルのインタラプト優先度 | 使用 | 不 |
| INTCON | 7 | GIEH | 高優先度インタラプトを使用許可 | 許可 | 不 |
| 6 | GIEL | 低優先度インタラプトを使用許可 | 許可 | 不 | |
| PIR1 | 1 | CCP1IF | CCP1 発生フラグ | 発生 | |
| PIE1 | 1 | CCP1IE | CCP1 インタラプトを使用許可 | 許可 | 不 |
| IPR1 | 1 | CCP1IP | CCP1 インタラプト優先度 | 高 | 低 |
| CCP1CON | 7 | P1M1 | 00 = シングル出力(規定値)、01 = フルブリッジ順方向出 10 = ハーフブリッジ出力、 11 = フルブリッジ逆方向出 |
||
| 6 | P1M0 | ||||
| 5 | DC1B1 | PWM デューティ サイクル値の下位 ビット | |||
| 4 | DC1B0 | PWM デューティ サイクル値の最下位 ビット | |||
| 3 | CCP1M3 | 0000 =CCPモジュール全体をOFF(規定値) 1100 = P1A-P1Cを正論理 1101 = P1A,P1Cを正論理、P1B,P1Dを負論理 1111 = P1A-P1Cを負論理 1110 = P1A,P1Cを負論理、P1B,P1Dを正論理 |
|||
| 2 | CCP1M2 | ||||
| 1 | CCP1M1 | ||||
| 0 | CCP1M0 | ||||
| PSTRCON | 4 | STRSYNC | 出力をPWM周期に同期 | する | しない |
| 3 | STRD | P1D PinにPWM波形を出力 | する | しない | |
| 2 | STRC | P1C PinにPWM波形を出力 | する | しない | |
| 1 | STRB | P1B PinにPWM波形を出力 | する | しない | |
| 0 | STRA | P1A PinにPWM波形を出力 | する | しない | |
| プリスケラ値 | 1/16 | 1/4 | 1/1 | ||||
|---|---|---|---|---|---|---|---|
| PR2 セット値 | 0xFF | 0xF9 | 0xFF | 0xF9 | 0xFF | 0xF9 | |
| Fosc | 4MHz | 244Hz | 250Hz | 976Hz | 1KHz | 3.91KHz | 4KHz |
| 16MHz | 976Hz | 1KHz | 3.91KHz | 4KHz | 15.6KHz | 16KHz | |
| 48MHz | 2.93KHz | 3KHz | 11.7KHz | 12KHz | 46.9KHz | 48KHz | |
Foscとボーレートの関連
タイマー2とCCPでPWM波形を発生させるプログラムを作成しました。繰り返し周波数は、976Hzで固定ですが、デューティーサイクルをVRで可変できます。
<プログラム>
//---------------------------------------------------------
// CCP PWM機能の確認
// VRの値で出力するデューティサイクルが変化する
// CCP → PWM機能で signalOut のDutyを変化させる
// VR → VRの値をAD変換しDuty値とする
// Notes: 4MhzM内部クロック
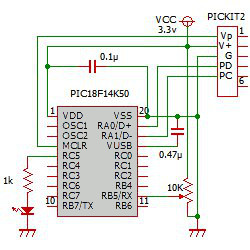
// AN11(RB5) VR入力
// RC5 signalOut
// Language: MPLABX XC8 Target: PIC18F14K50
//--------------------------------------------------------
#include <xc.h>
#define _XTAL_FREQ 4000000 // delay_ms(x) のための定義
#define signalOut LATCbits.LATC5
//-------------- コンフィグレーション ----------------------
#pragma config FOSC = IRC // 内部クロック
#pragma config USBDIV = OFF, CPUDIV = NOCLKDIV
#pragma config IESO = OFF, FCMEN = OFF, PLLEN = ON
#pragma config BORV = 30, BOREN = OFF, PWRTEN = OFF
#pragma config WDTPS = 32768, WDTEN = OFF
#pragma config MCLRE = OFF, HFOFST = OFF, XINST = OFF
#pragma config BBSIZ = OFF, LVP = OFF, STVREN = ON
#pragma config CP1 = OFF, CP0 = OFF, CPD = OFF, CPB = OFF
#pragma config WRT1 = OFF, WRT0 = OFF, WRTB = OFF, WRTC = OFF
#pragma config EBTR1 = OFF, EBTR0 = OFF, EBTRB = OFF
//------------------メインプログラム------------------------------
void main(void){
OSCCON = 0b01010010; // 内部クロック4Mhz
TRISC = 0b11011111; // PortC RC5出力
// ---------------- ADCの 設定 -----------------------------------
ADCON2 = 0b00101100; // 左詰め出力,AD変換クロックFosc/4
// チャージ時間 12_TAD
ADCON1 = 0b00000000; // 正基準電圧 VDD, 負基準電圧 VSS
ADCON0 = 0b00101101; // アナログ入力 AN11(RB5),ADC ON
ANSELHbits.ANS11 = 1; // AN11はアナログ入力に設定
// --------------- CCPの 設定 ------------------------------------
// システムクロック(4Mhe/4)をカウントする
// Prescalerでさらに1/4にした250KHzをカウントする
CCP1CON = 0b00001100; // PWM P1A-P1Cを正論理で出力
CCPR1L = 0b01111111; // PWM Dutyの仮設定1
PSTRCON = 0b00000001; // P1Aを出力
T2CON = 0b00000101; // Prescalerでさらに1/4
while(1){
ADCON0bits.GO = 1; // AD変換開始
while(ADCON0bits.GO); // AD変換終了待ち
CCPR1L = ADRESH; // AD変換結果をCCP繰返周期に
__delay_ms(100); // LEDちらつき防止の遅延
}
}
*注意*
PWM 信号を出力するピンは、TRIS ビットを"0"出力に設定する必要があります。